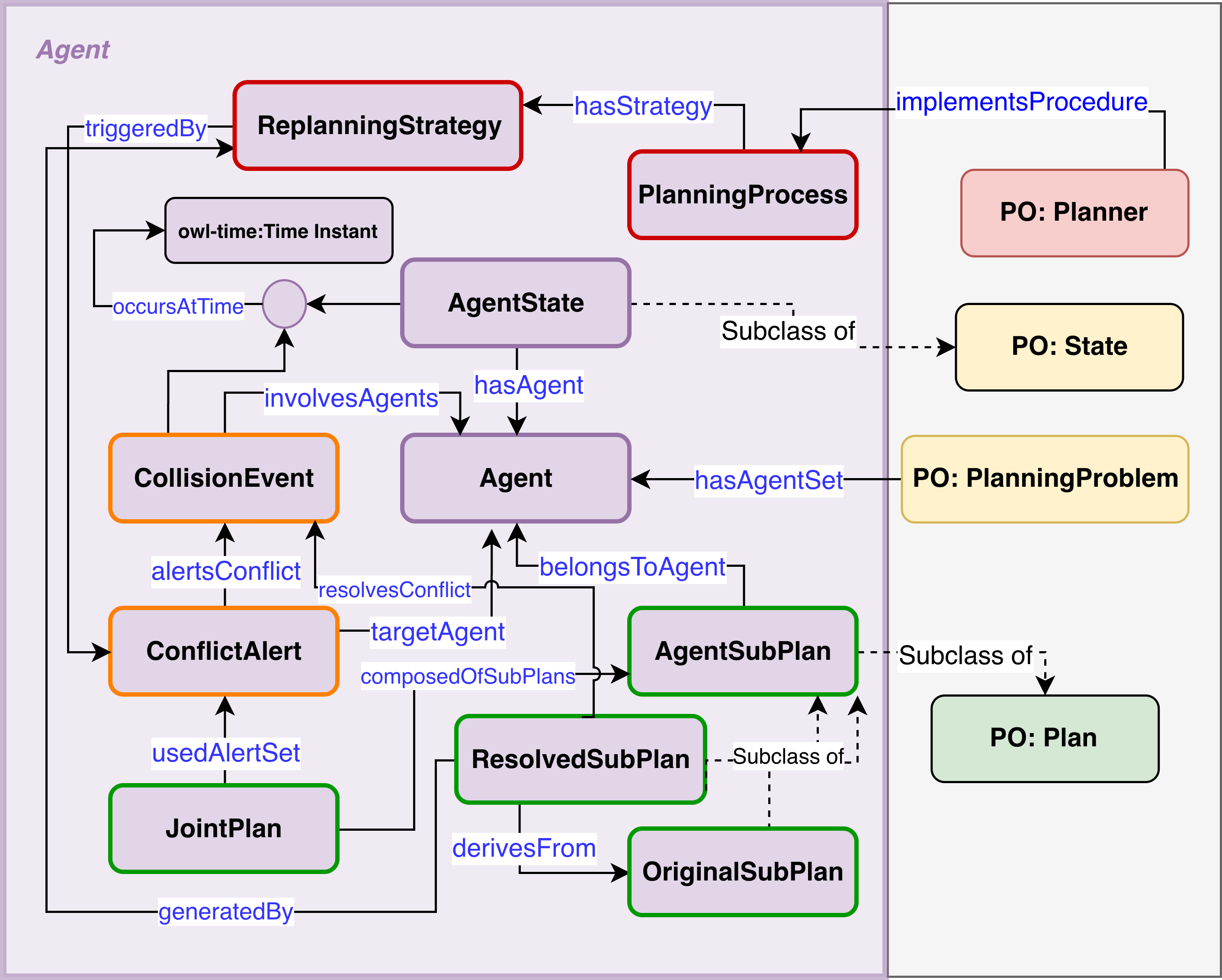
maPO: An Ontology for Multi-Agent Path Finding and Its Usage for Explaining Planner Behaviour
Artificial Intelligence Institute of South Carolina (AIISC) · University of South Carolina



MAPF Explanations
Planner-agnostic
Ontology
SPARQL-based
Reference Links
Funding. This work was supported in part by a J.P. Morgan Chase Faculty Award, AFOSR Award No. FA9550-24-1-0228, and NSF Award Nos. 2337998 and 2454027.
AAAI 2026 Spring Symposium Series · MAKE 2026
Machine Learning and Knowledge Engineering for Knowledge-Grounded Semantic Agents
A planner-agnostic semantic framework for turning MAPF traces into provenance-aware, SPARQL-queryable explanations.