Abstract
Multi-Agent Path Finding (MAPF) is central to coordinating multiple agents in shared environments. Existing solutions impose significant requirements on communication, sensing, and computation, limiting their applicability in resource-constrained robotic deployments. Centralized search methods require full access to global state information and high-bandwidth channels, while distributed learning-based methods depend on sophisticated onboard perception (e.g., LiDAR, RGB-D cameras) and frequent inter-agent communication.
To address these limitations, we formulate Information-Centric MAPF (I-MAPF) and introduce HI-MAPF, a hybrid framework that augments decentralized planning with a lightweight centralized coordinator. We further introduce a method-agnostic metric, Information Units (IU), to quantify coordination overhead as a proxy for deployment cost. We evaluate HI-MAPF against recent communication-focused algorithms in both simulation (8–128 agents across structured and unstructured environments) and on ground robots in a physical deployment, demonstrating 2× to 510× reduction in information sharing while maintaining high success rates.
I-MAPF: Information-Centric Formulation
We characterize MAPF coordination by the information available to each agent $i$ at time $t$:
- $\mathcal{M}_i = (V, E, O)$ — (possibly partial) environment knowledge: grid cells, edges, and obstacles
- $\mathcal{S}_i = (s_i^t, g_i^t, \pi_{i|t_s:t_r})$ — self-state: current position, goal, and planned trajectory
- $\mathcal{O}_j = \{(s_j^t, g_j^t, \pi_{j|t_s:t_r})\}_{j \in \mathcal{N}_i(t)}$ — other-agent information available through sensing or communication
- $\mathcal{E}_{ij}(t)$ — event-triggered coordination signals: predicted collisions, deadlocks, or constraint/alert messages
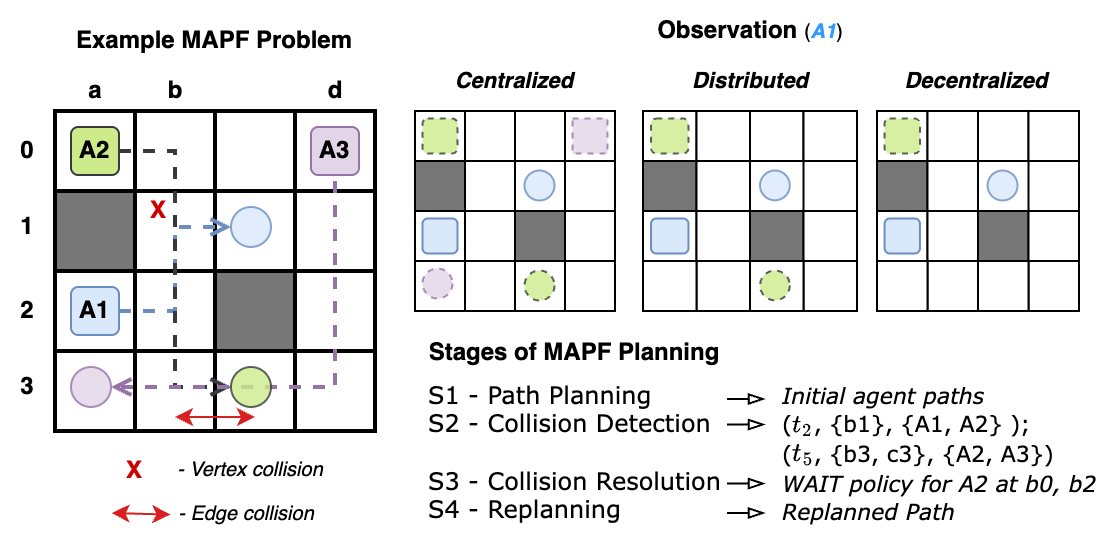
Different MAPF paradigms differ in how much of $\mathcal{I}_i(t)$ each agent accesses: Centralized methods use global $\mathcal{M}$ and all agents' trajectories. Distributed methods restrict $\mathcal{M}_i$ to a local FOV and $\mathcal{O}_j$ to neighbors. Hybrid methods (including HI-MAPF) selectively reveal $\mathcal{O}_j$ and constraints in response to $\mathcal{E}_{ij}(t)$.
Information Units (IU)
To enable principled comparison of information consumption across MAPF paradigms, we define:
Lower IU indicates lower bandwidth, energy, and onboard hardware burden, improving feasibility for long-term robotic deployment. A $d$-dimensional inter-agent message vector (e.g., SCRIMP's 512-dim messages) contributes $d$ IUs per transmission.
HI-MAPF Framework
HI-MAPF operates as a four-stage pipeline that iterates until all conflicts are resolved:
- S1 — Decentralized Planning: Each agent independently computes a path using A* with only map knowledge $\mathcal{M}_i$ and its own start/goal. No inter-agent communication. 0 inter-agent IU.
- S2 — Centralized Conflict Detection: A coordinator scans all submitted trajectories for vertex and edge conflicts.
- S3 — Heuristic Control: For each conflict $c = (t_j, \Delta_c, A_c)$, the controller selects a replanning agent via Fewest Future Collisions (FFC) heuristic and issues an alert $\mathcal{A}(c) = (a_{c_k}, t_{j-r}, \Delta_c)$ — only the conflict location and time, a payload of a few bytes.
- S4 — Tiered Replanning: The selected agent replans using one of four escalating strategies, each consuming more information but applied only when lower tiers fail.
Tiered Replanning Strategies
Strategy Allocation & Effectiveness
Across all simulated benchmarks (8–128 agents), the vast majority of conflicts are resolved at the cheapest tier:
▸ Per-Map Strategy Breakdown
| Map | Yield | Static | Dynamic | Joint |
|---|---|---|---|---|
| random-32 | 91.8% (91.4% sr) | 7.6% (99.1%) | 0.3% (11.1%) | 0.3% (71.7%) |
| random-64 | 97.9% (97.9% sr) | 2.0% (98.7%) | 0.0% | 0.0% |
| den312d | 98.1% (98.0% sr) | 1.9% (100%) | 0.0% | 0.0% |
| warehouse | 99.2% (99.2% sr) | 0.8% (100%) | N/A | N/A |
Results
Hardware Validation (5 TurtleBot4)
All five algorithms achieve 100% success rate across five problem instances. HI-MAPF achieves the lowest average makespan (12.2) and the lowest total IU (199), compared to 42,413 IU for SCRIMP (213×).
| Algorithm | Success Rate | Avg Makespan | Total IU | IU Multiplier | Exec Time (s) |
|---|---|---|---|---|---|
| HI-MAPF | 100% | 12.2 | 199 | 1.0× | 181.5 |
| MAPF-GPT-2M | 100% | 13.6 | 588 | 3.0× | 176.2 |
| DCC | 100% | 19.4 | 596 | 3.0× | 235.0 |
| EPH | 100% | 21.8 | 623 | 3.1× | 234.9 |
| SCRIMP | 100% | 16.4 | 42,413 | 213.0× | 211.2 |

Physical deployment: 5 TurtleBot4 robots in a 6×6 grid using ROS 2
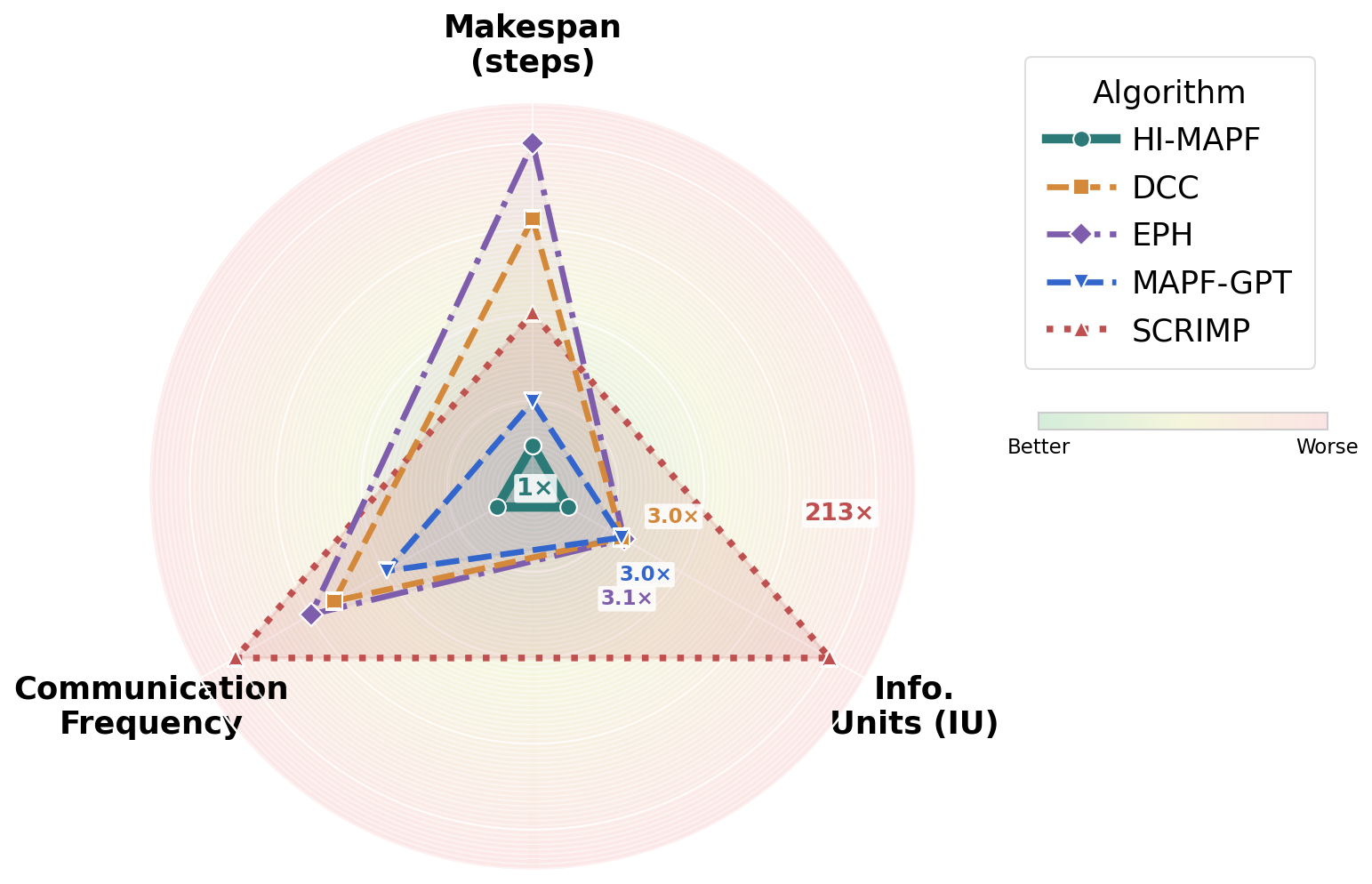
Multi-axis comparison: HI-MAPF achieves the most balanced profile across makespan, IU, and communication frequency
Hardware demo: robots communicate only via lightweight alert protocol.
Information Unit Breakdown
Simulation Benchmarks
We evaluated HI-MAPF on four standard MAPF benchmarks against CBS, SCRIMP, DCC, MAPF-GPT-2M, and EPH across 8–128 agents.
Quantitative results across agent densities. View full per-map results →
Publications
-
Under ReviewHI-MAPF: Towards Resource-Efficient Multi-Agent Deployment with Minimal Inter-Agent Information Sharing